import cv2 #OpneCV というライブラリのインポート
import RPi.GPIO as GPIO # GPIO のライブラリのインポート
cap = cv2.VideoCapture(1) # オブジェクトを生成
# 引数 -- 0もしくは -1をデバイス番号として指定します 1やそれ以上の番号を指定することも可能
# カメラが1台なら 「0」 複数なら「1」など ※うまくいかない場合は変更をしてみる
last_img = None # 前回の画像を記憶
red = (0, 0, 255) # 四角の外枠の色 BGR の並び
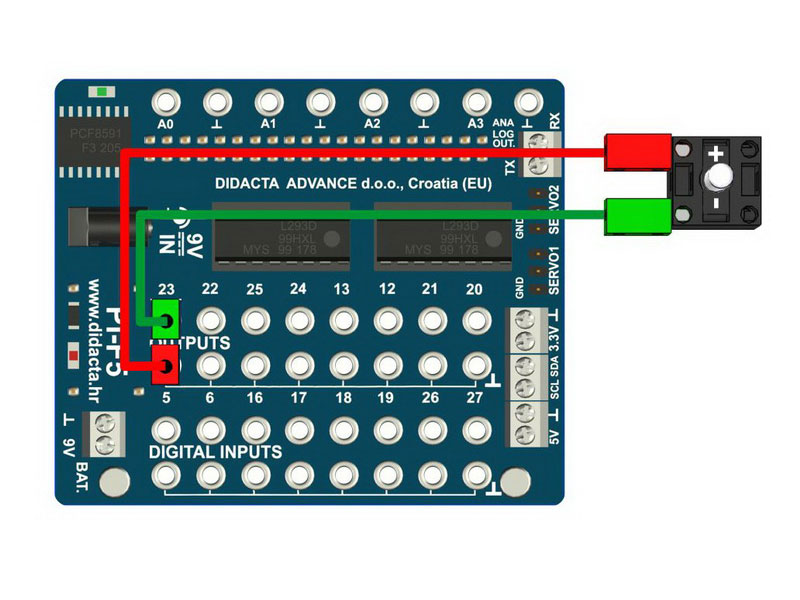
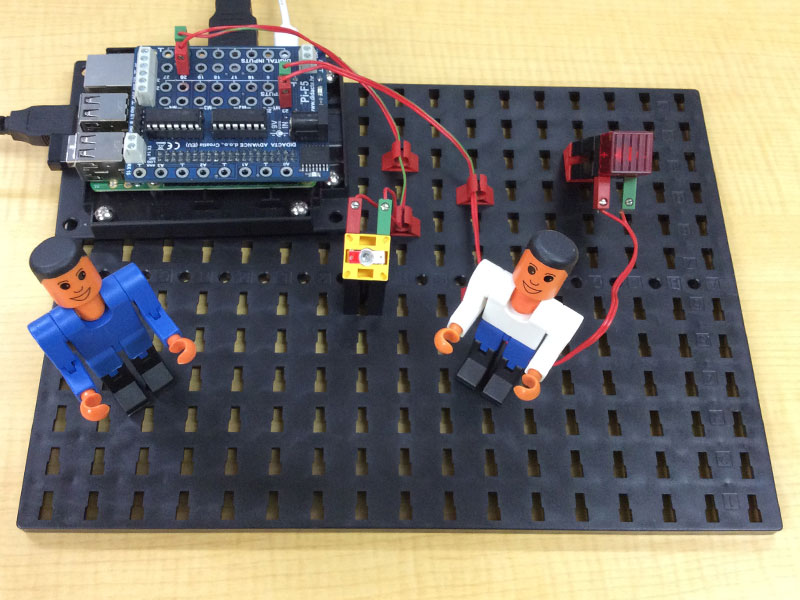
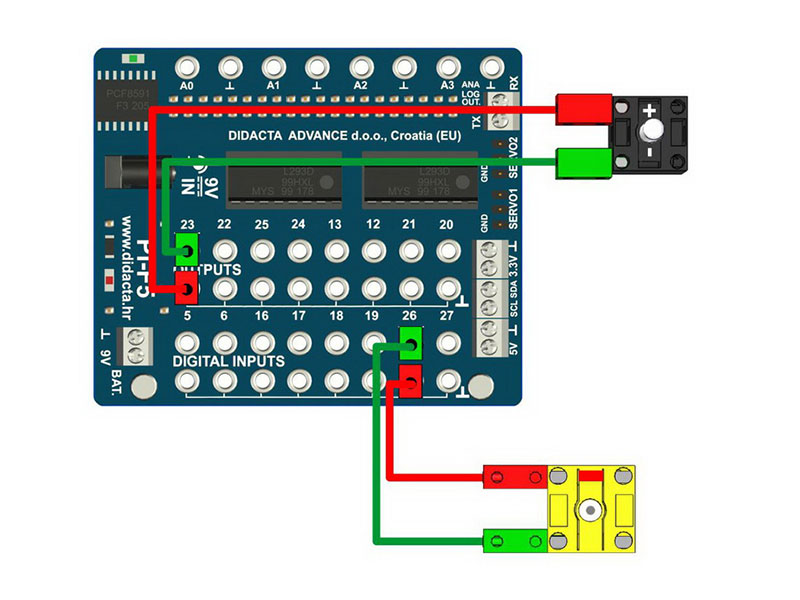
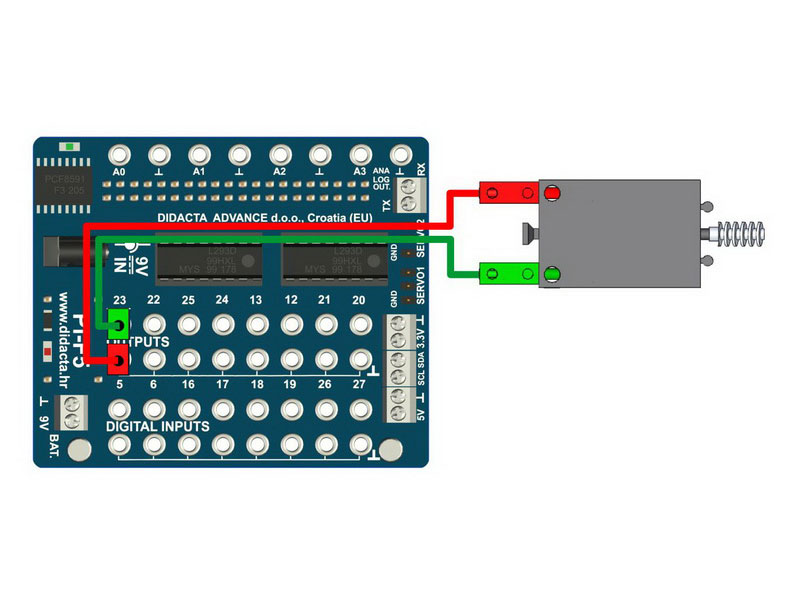
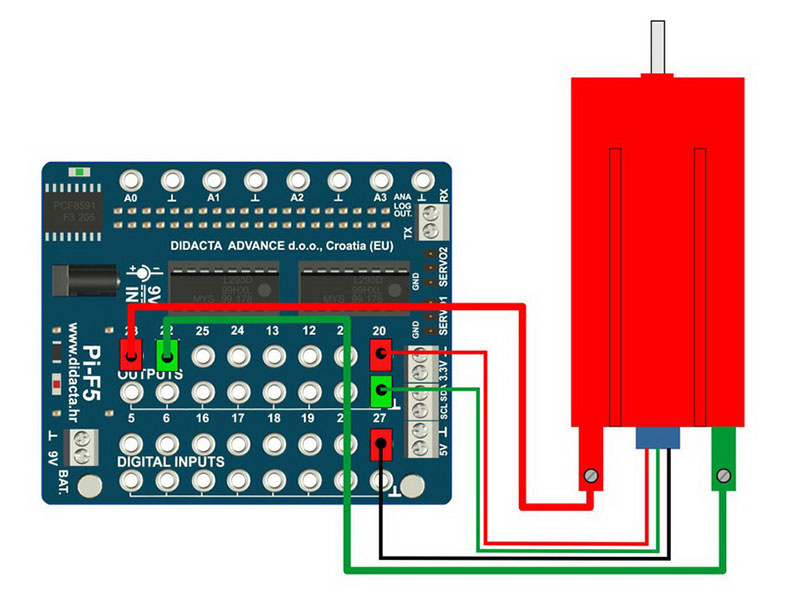
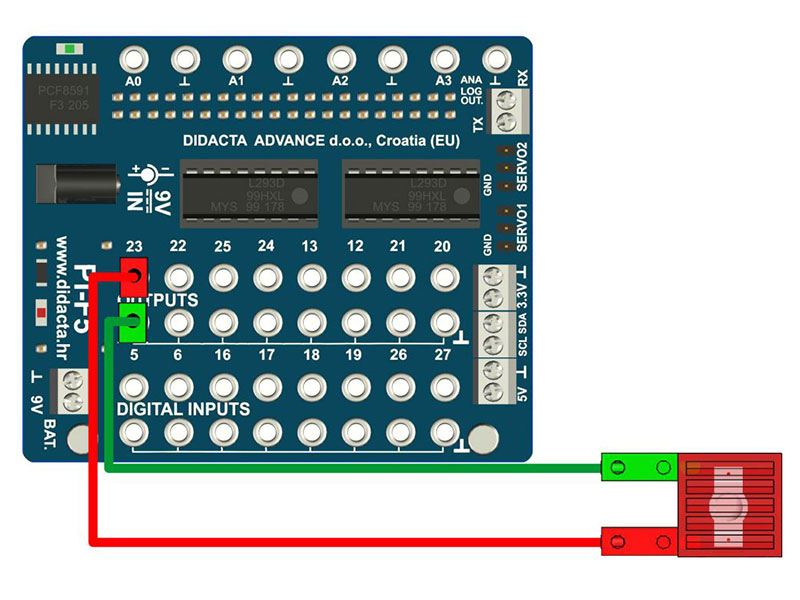
led = 5 # led の ピンを 5 で割り当てる
GPIO.setwarnings(False) # 以前に実行したGPIOポートの状態が残っていた時に出力される警告文を抑制する
GPIO.setmode(GPIO.BCM) # ピン番号ではなく役割に記載されたGPIOの数字で指定する
GPIO.setup(led,GPIO.OUT) # 出力
while True:
# 画像 (フレーム)を取得
_, frame = cap.read()
# サイズの変更
frame = cv2.resize(frame, (500, 300))
# グレースケール (白黒へ)
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
gray = cv2.GaussianBlur(gray, (9, 9), 0)
img_b = cv2.threshold(gray, 100, 255, cv2.THRESH_BINARY)[1]
# 変化を確認
if last_img is None:
last_img = img_b
GPIO.output(led,GPIO.LOW)
continue
frame_diff = cv2.absdiff(last_img, img_b)
cnts = cv2.findContours(frame_diff,
cv2.RETR_EXTERNAL,
cv2.CHAIN_APPROX_SIMPLE)[0]
# 変化を画面に描画 (四角の描画)
for pt in cnts:
x, y, w, h = cv2.boundingRect(pt)
if w < 30:
GPIO.output(led, GPIO.LOW) # OFF
continue# 50以下を反映しない
else:
GPIO.output(led,GPIO.HIGH) # ON
cv2.rectangle(frame, (x, y), (x+w, y+h), red, 2)
# 上書き
last_img = img_b
# 画面に表示
cv2.imshow("VIDEO", frame)
cv2.imshow("DIFF", frame_diff)
# Enterキー を押したら
if cv2.waitKey(1) == 13: break
# キャプチャを解放する
cap.release()
cv2.destroyAllWindows() #現在までに作られた全てのウィンドウを閉じる関数