
micro:bit MakeCodeブロック・サンプルプログラム集
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||
|
||||
|
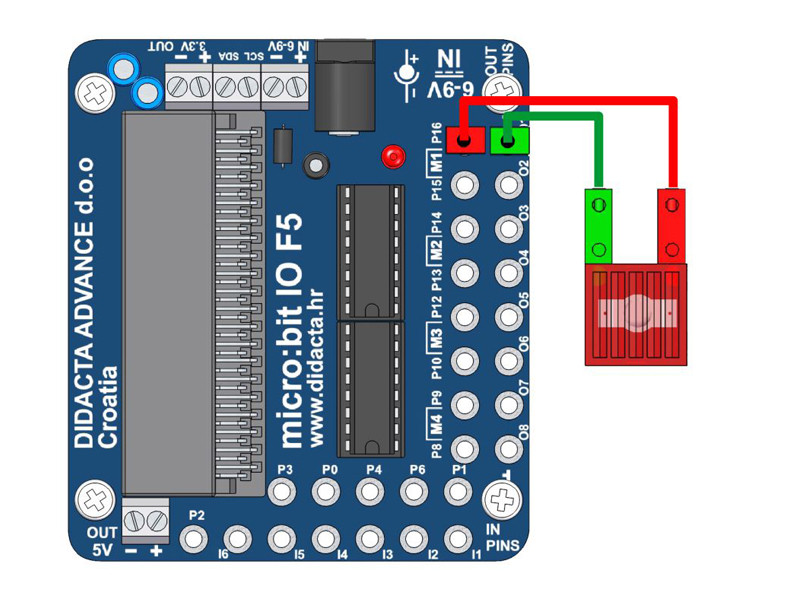
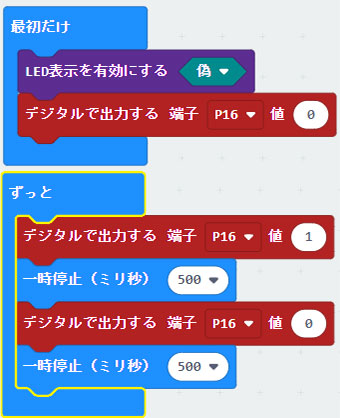
配線:LEDランプをOUT1(P16)に接続します。 |
||||
|


 |
||||
|---|---|---|---|---|
|
|
||||
|
||||
|
||||
|
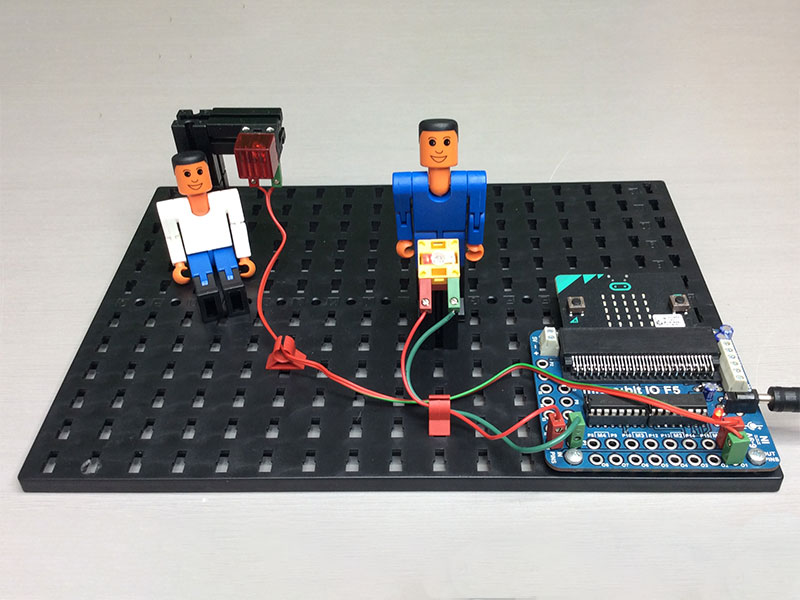
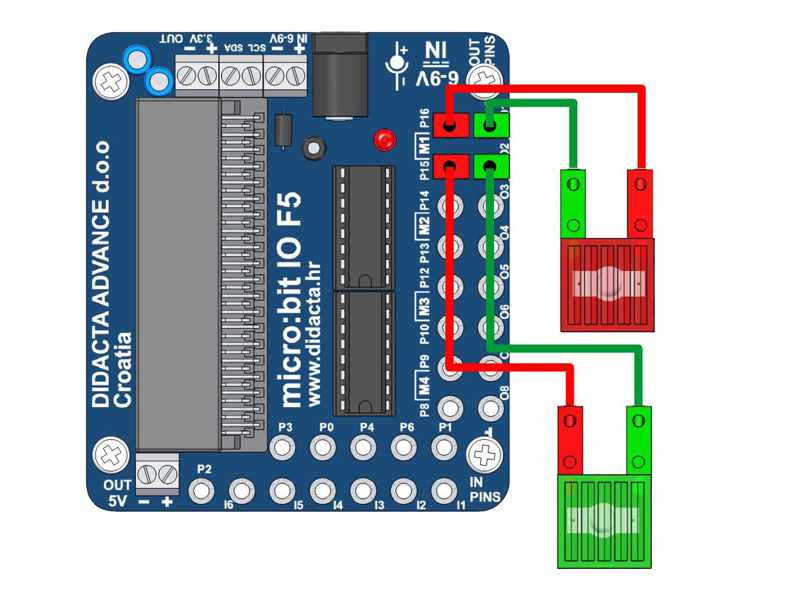
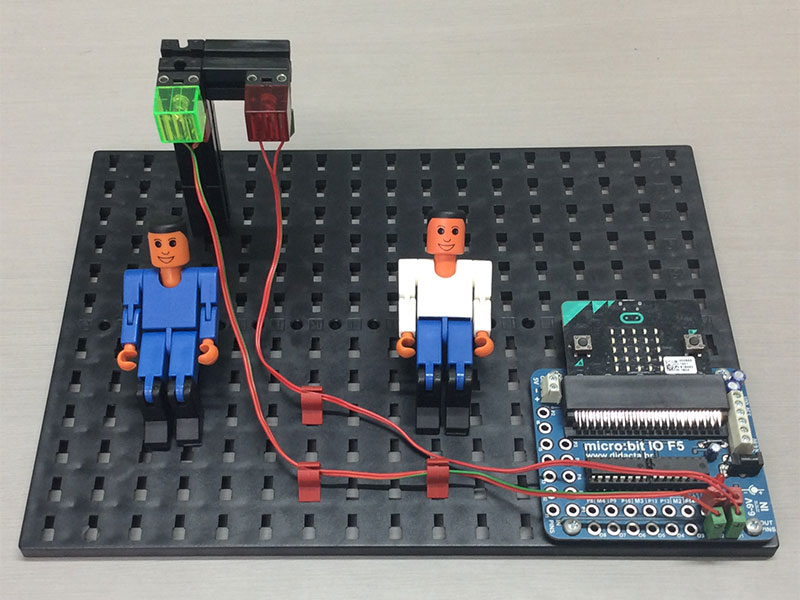
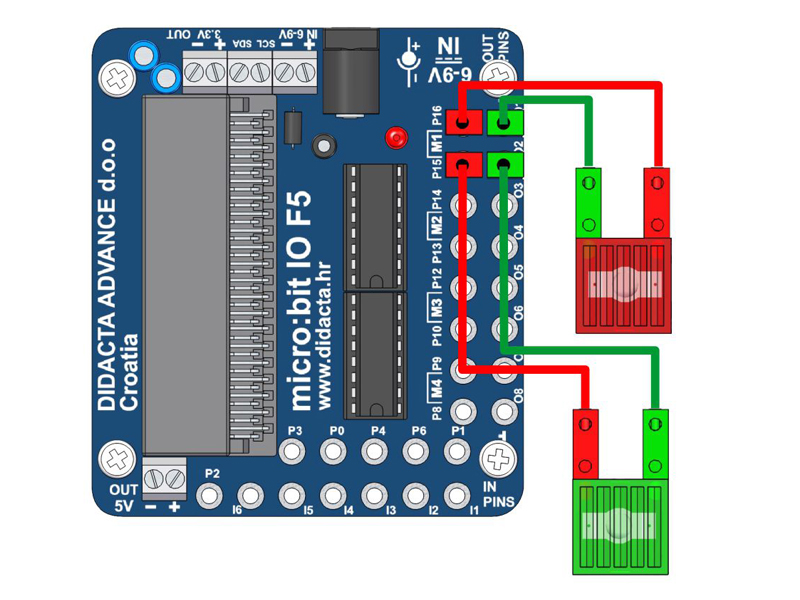
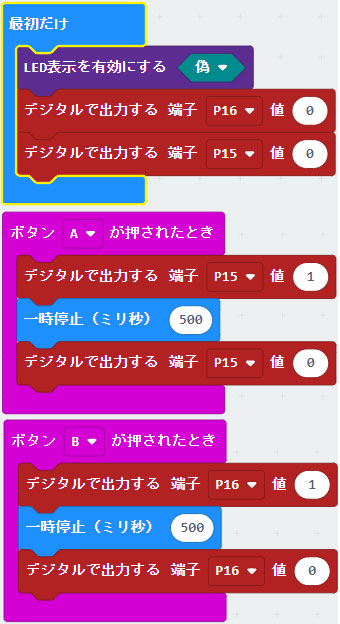
配線:赤LEDランプをOUT1(P16)に接続し、緑LEDランプをOUT2(P15)に接続します。 |
||||
|
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||
|
||||
|
配線:赤LEDランプをOUT1(P16)に接続し、緑LEDランプをOUT2(P15)に接続します。 |
||||
|
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||

|
||||
|
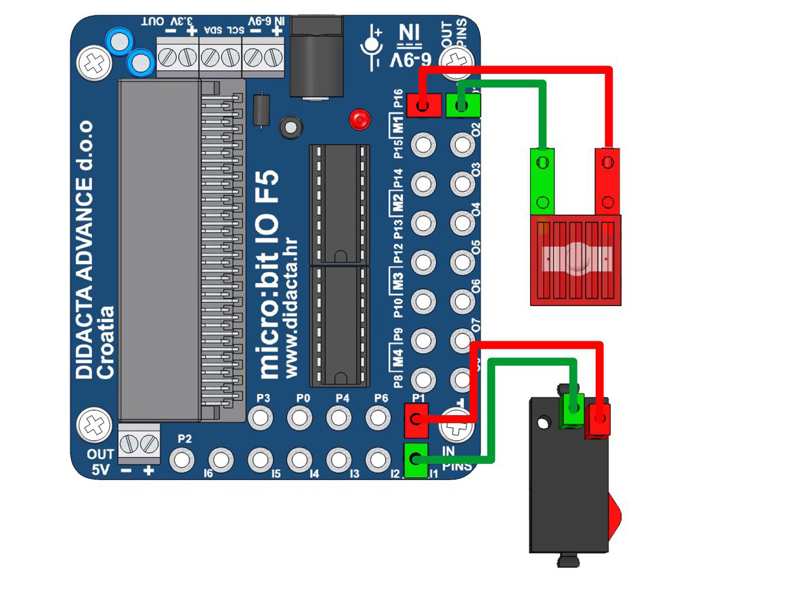
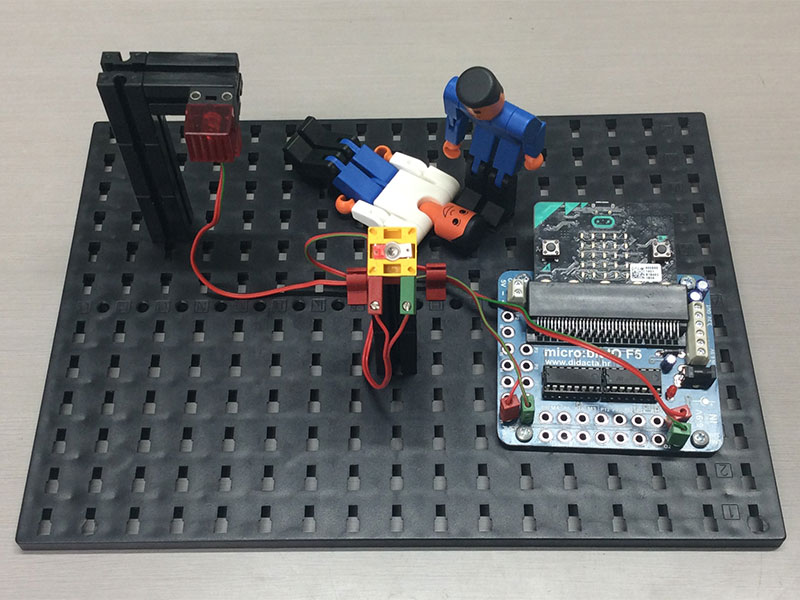
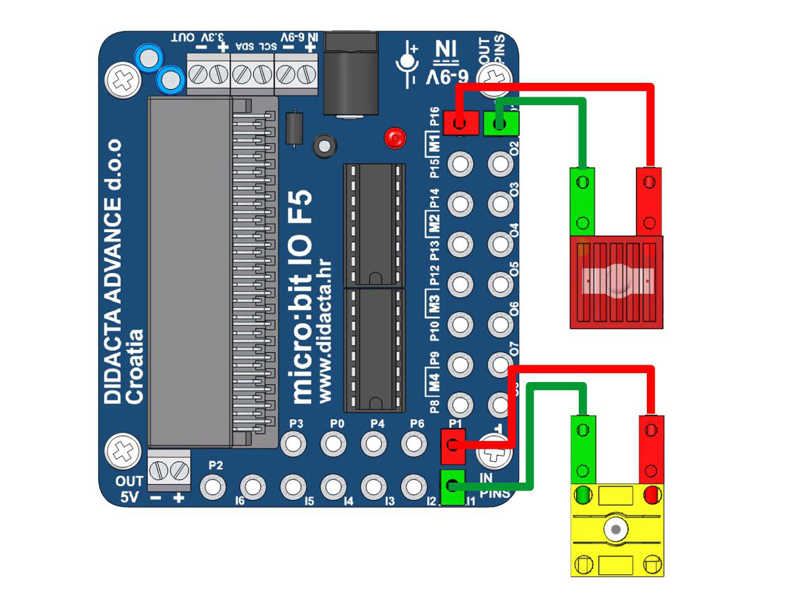
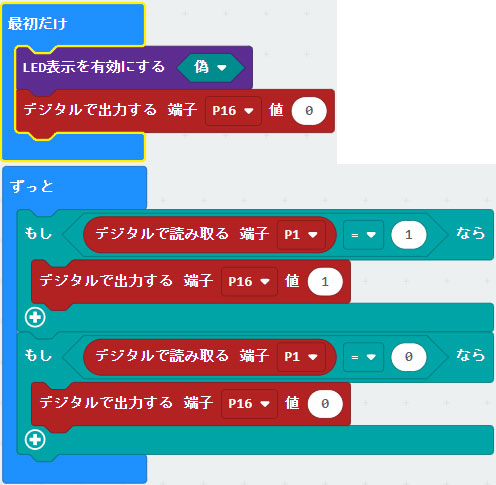
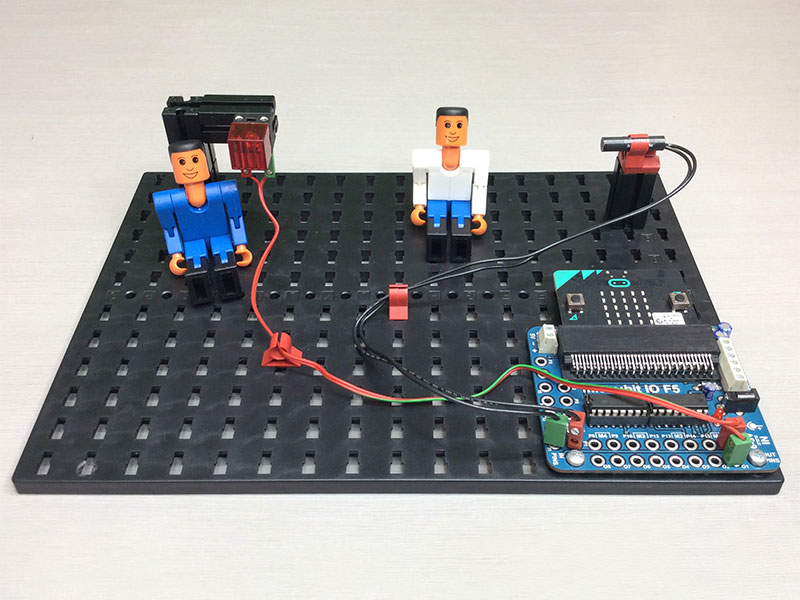
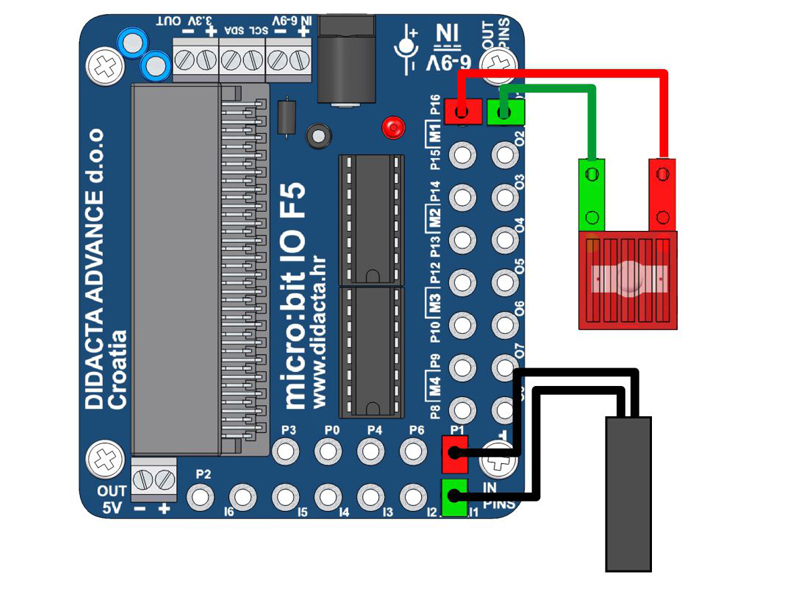
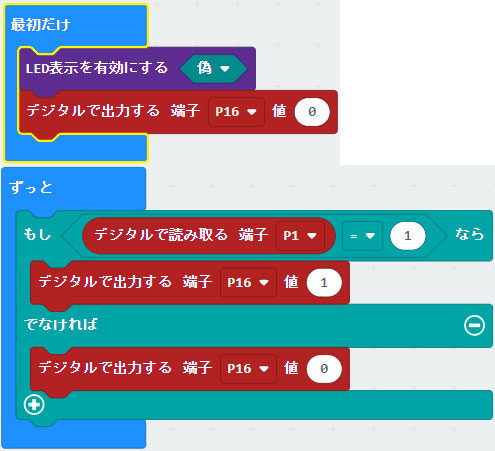
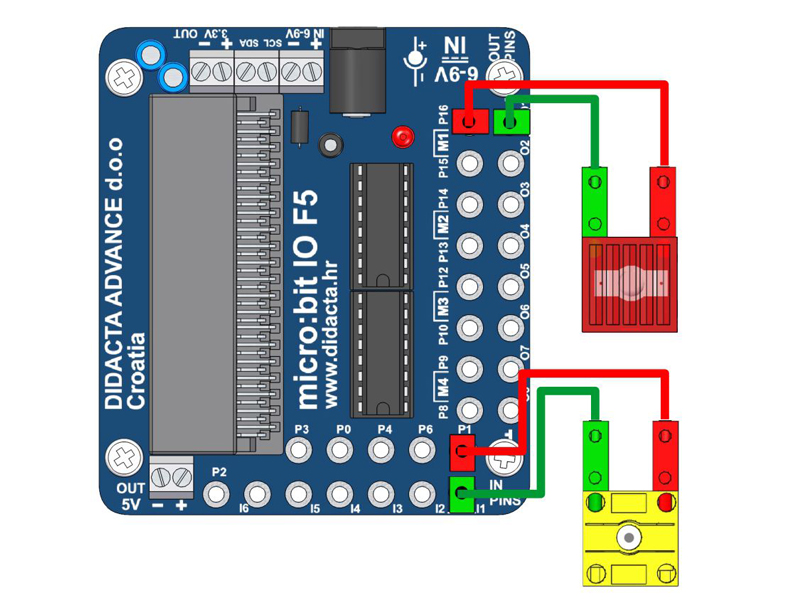
配線:LEDランプをOUT1(P16)に接続し、プッシュボタンをINPUT1(P1)に接続します。 |
||||
|
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||

|
||||
|
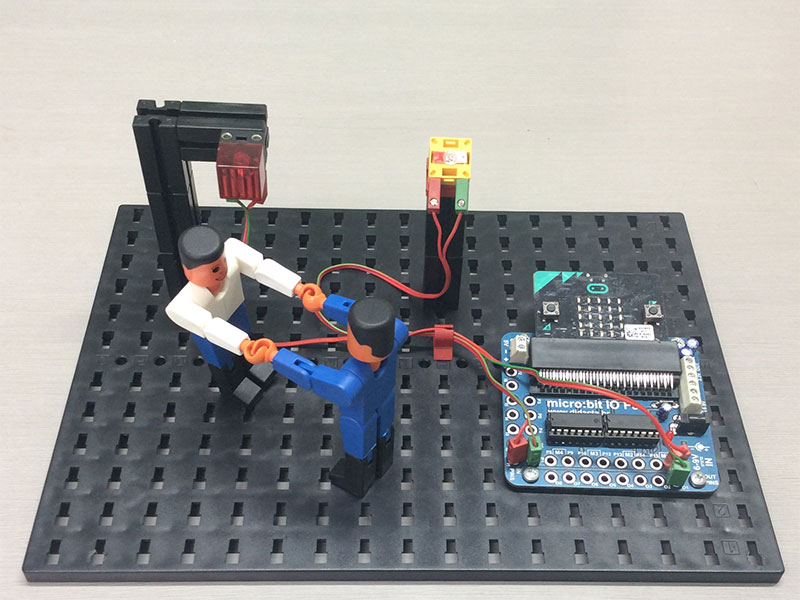
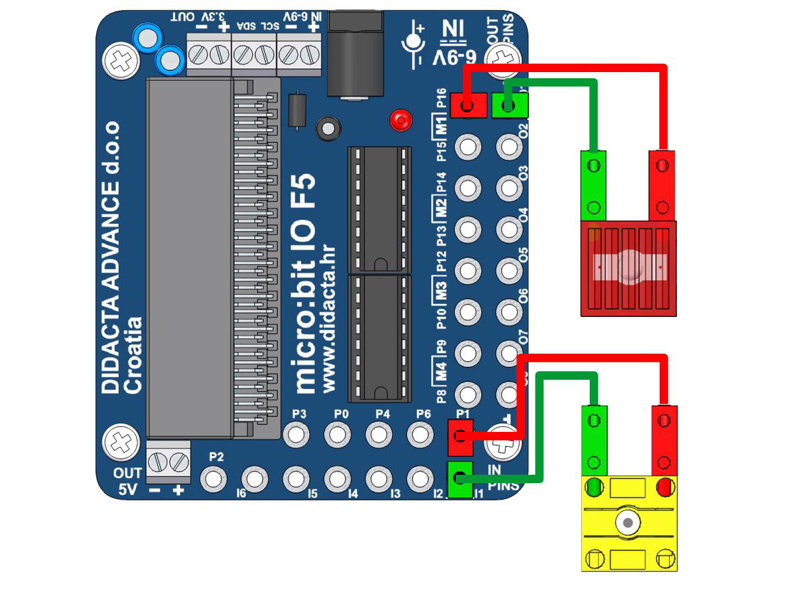
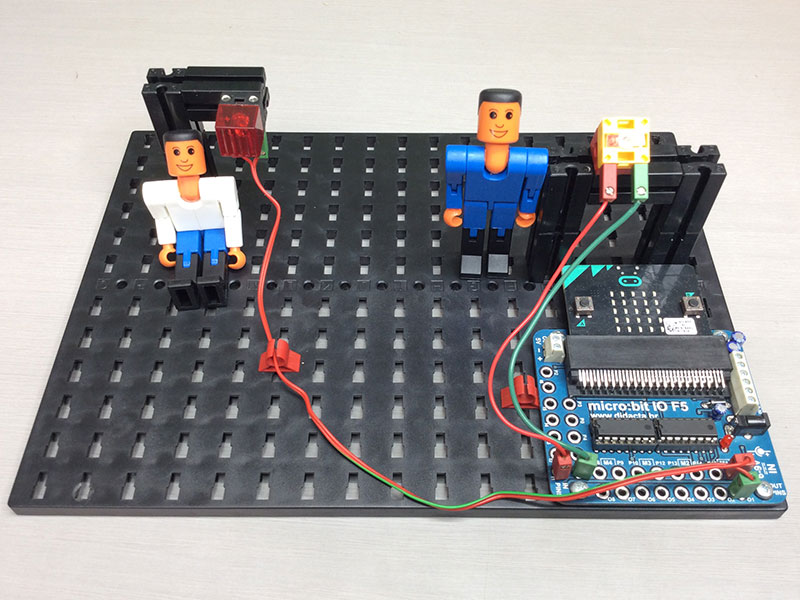
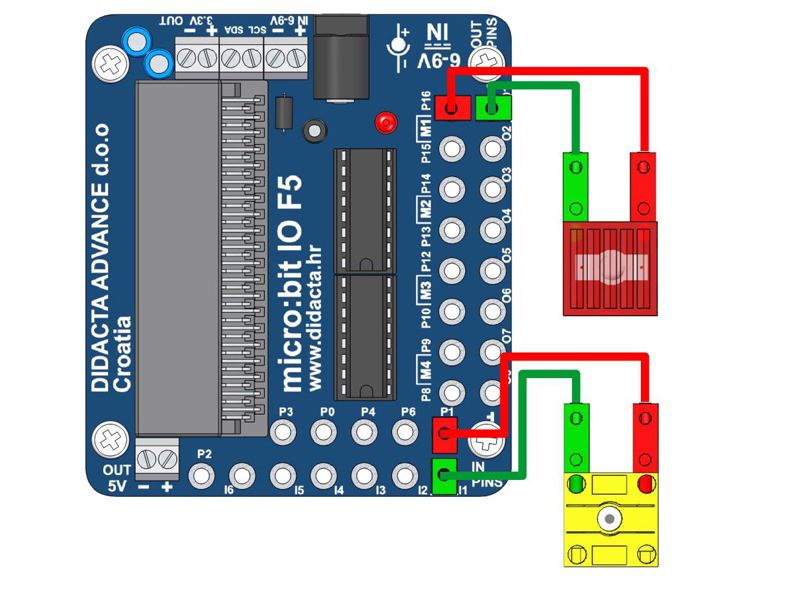
配線:LEDランプをOUT1(P16)に接続し、カラーセンサーをINPUT1(P1)に接続します。 |
||||
|
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||
|
||||
|
配線:LEDランプをOUT1(P16)に接続し、カラーセンサーをINPUT1(P1)に接続します。 |
||||
|
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||
|
||||
|
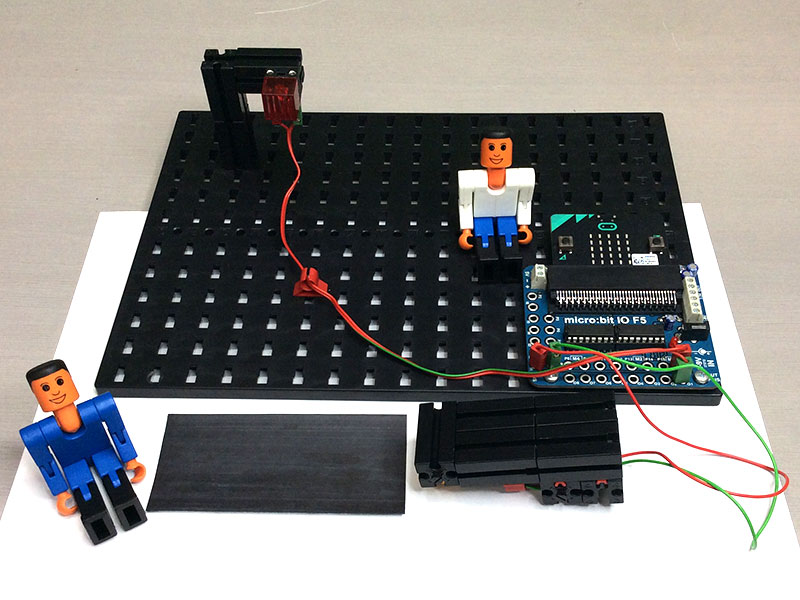
配線:LEDランプをOUT1(P16)に接続し、磁気センサーをINPUT1(P1)に接続します。 |
||||
|
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||
|
||||
|
配線:LEDランプをOUT1(P16)に接続し、カラーセンサーをINPUT1(P1)に接続します。 |
||||
|
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||
|
||||
|
配線:LEDランプをOUT1(P16)に接続し、カラーセンサーをINPUT1(P1)に接続します。 |
||||
|
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||
|
||||
|
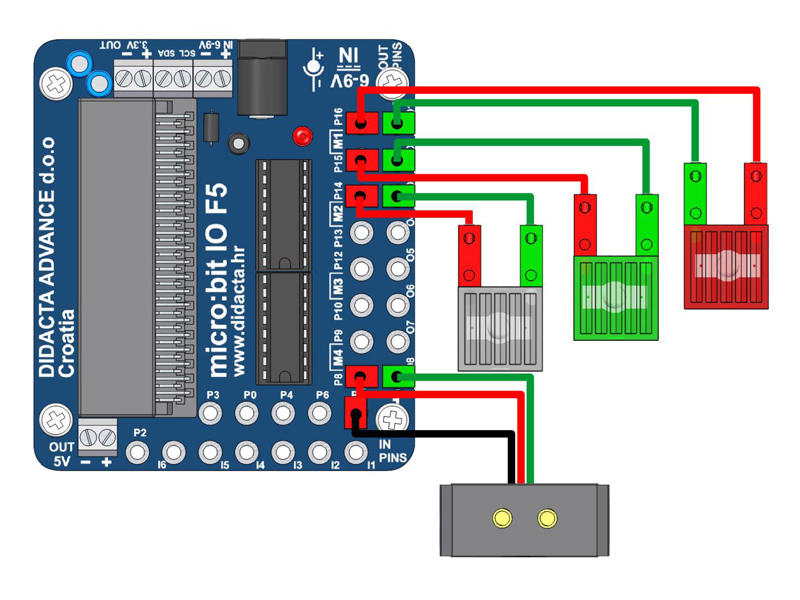
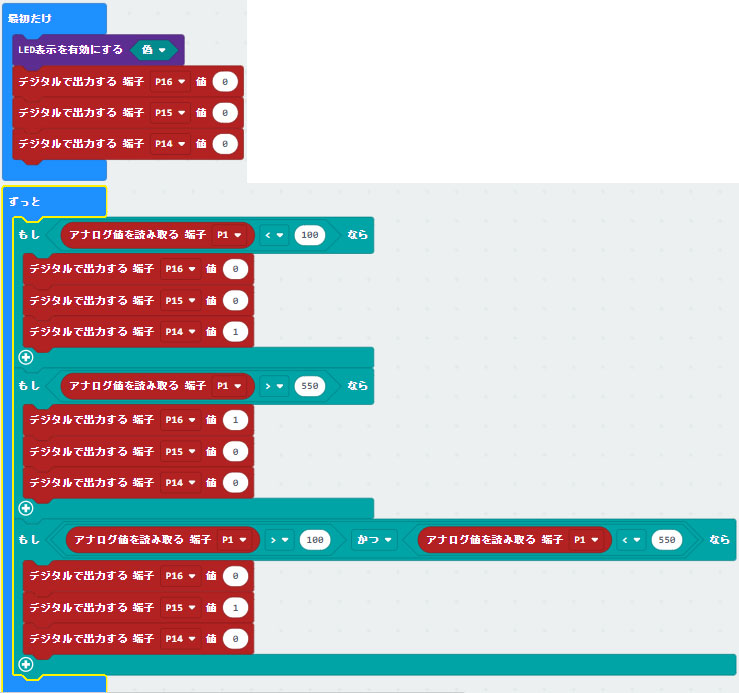
配線:赤LEDランプをOUT1(P16)、緑LEDランプをOUT2(P15)、白LEDランプをOUT3(P14)に接続します。そして、カラーセンサーをINPUT1(P1)に接続します。 |
||||
|
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||
|
||||
|
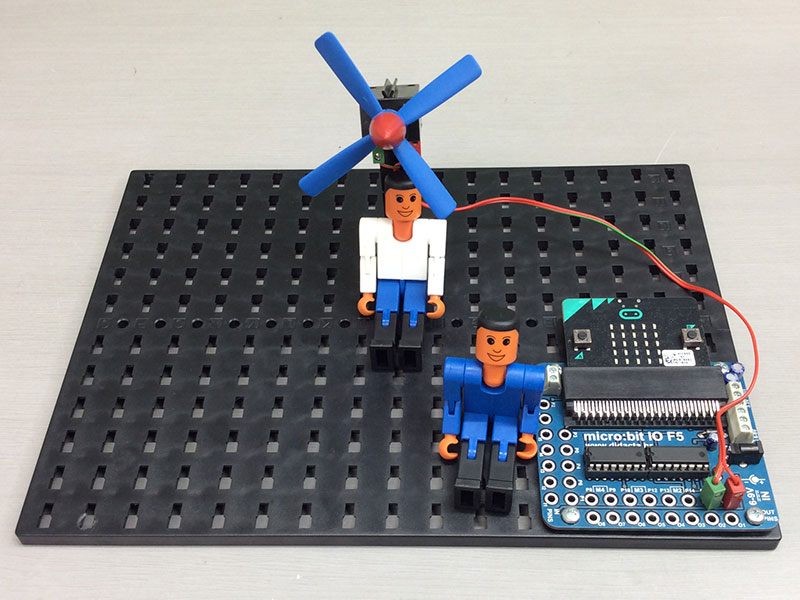
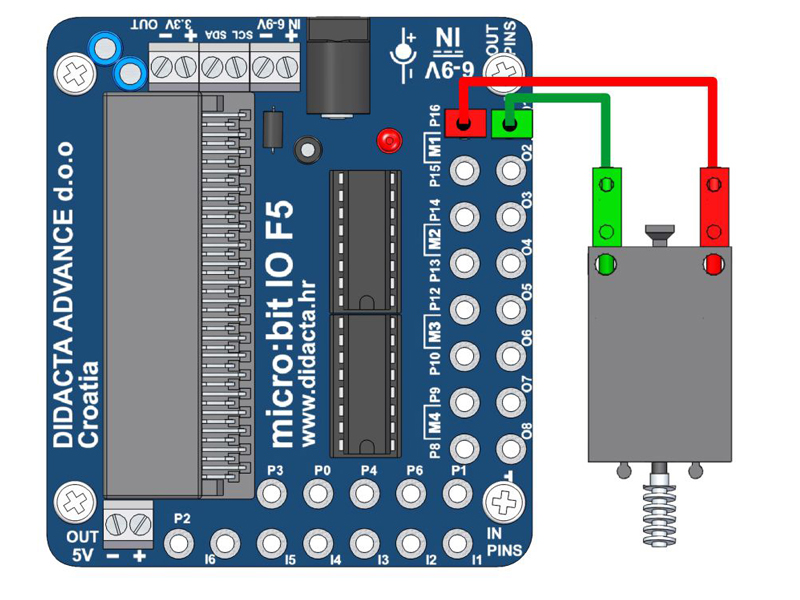
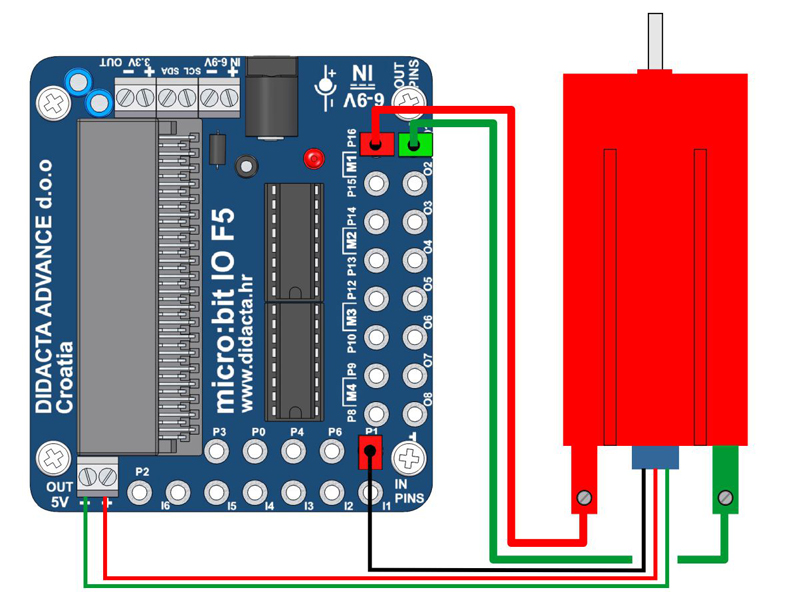
配線:モーターをOUT1(P16)に接続します。 |
||||
|
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||
|
||||
|
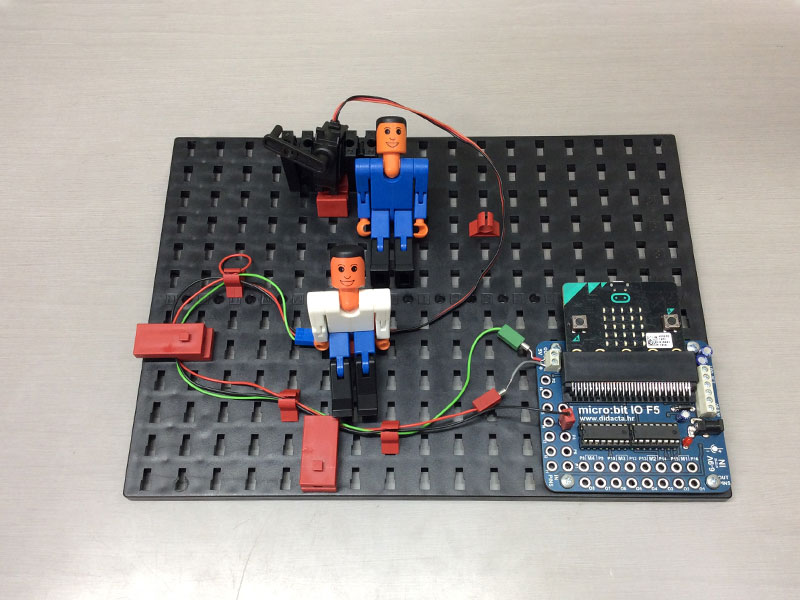
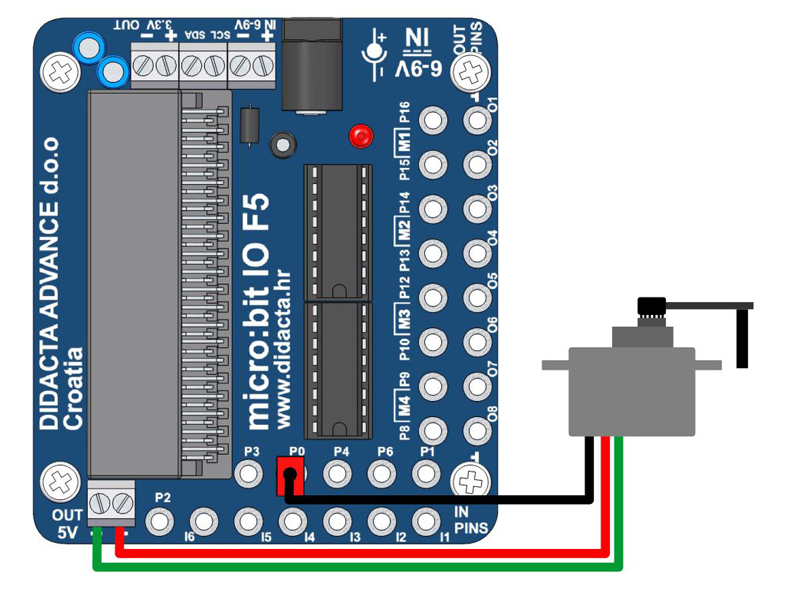
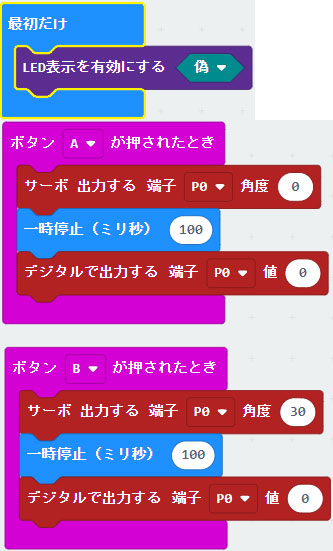
配線:サーボモーターを5V電源に接続し、信号線をP0に接続します。 |
||||
|
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||
|
||||
|
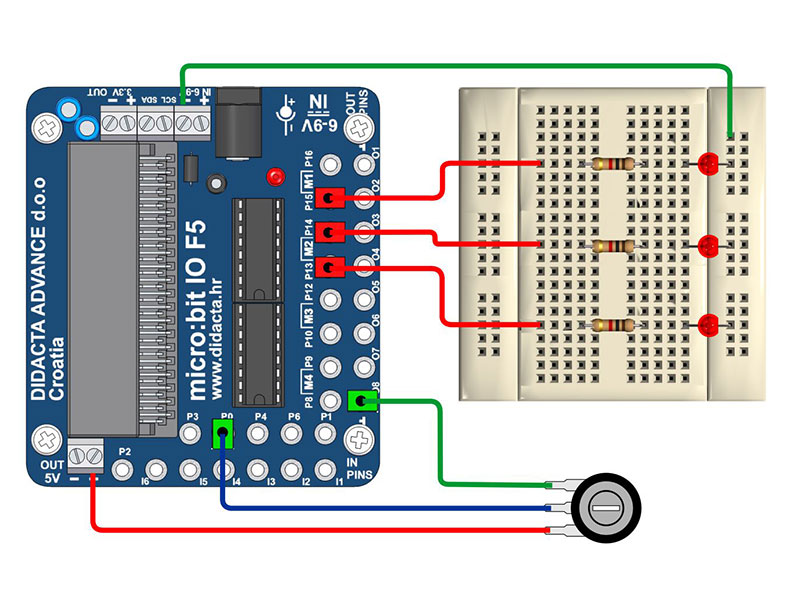
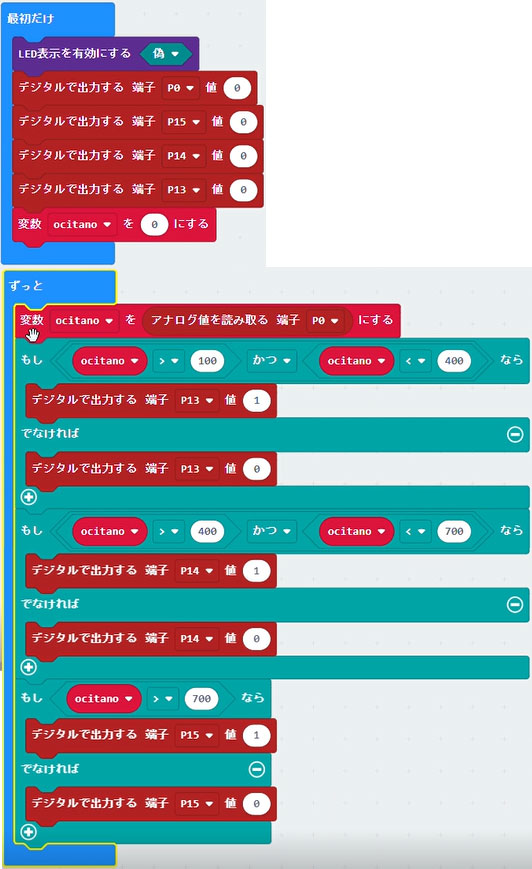
配線:ポテンショメーターをOUT+5V、OUT8、INPUT(P0)に接続します。 |
||||
|
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||

|
||||
|
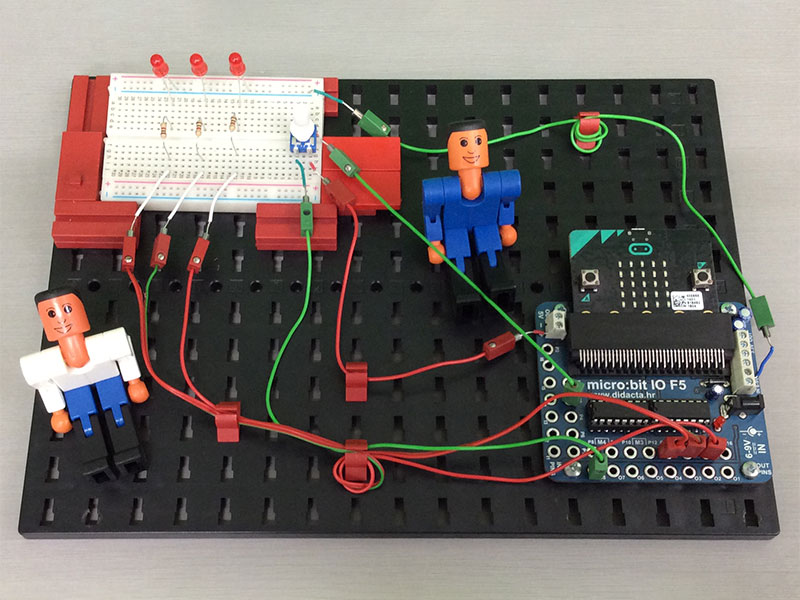
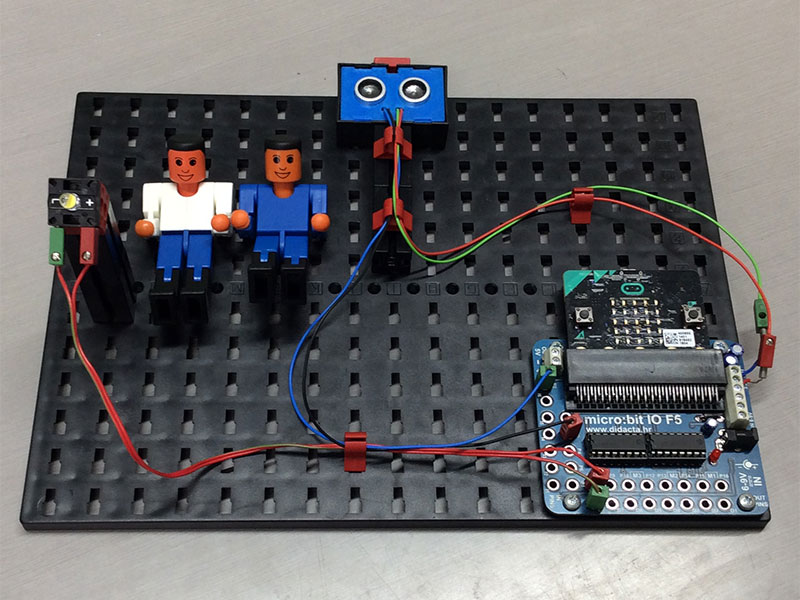
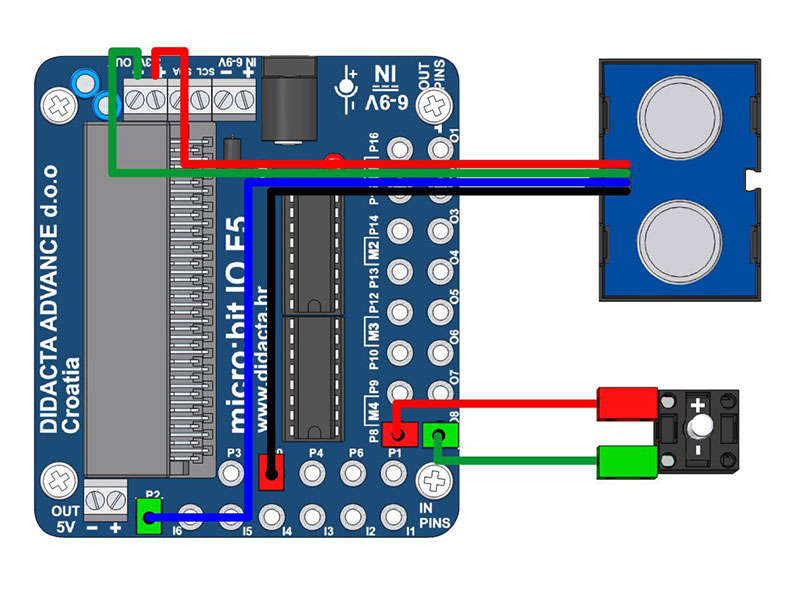
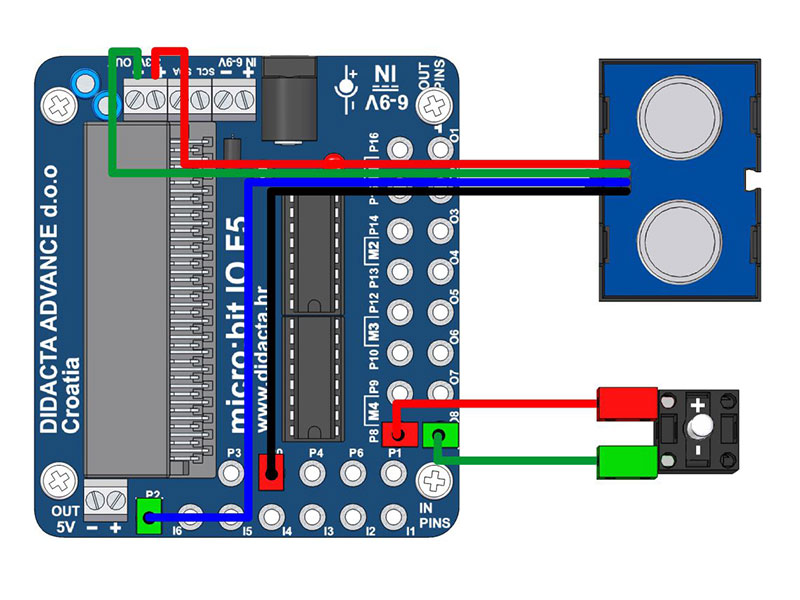
配線:超音波センサーを3.3V電源、P0・P2に接続します。LEDランプをOUT8(P8)に接続します。 |
||||
|
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||

|
||||
|
配線:超音波センサーを3.3V電源、P0・P2に接続します。LEDランプをOUT8(P8)に接続します。 |
||||
|
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||
|
||||
|
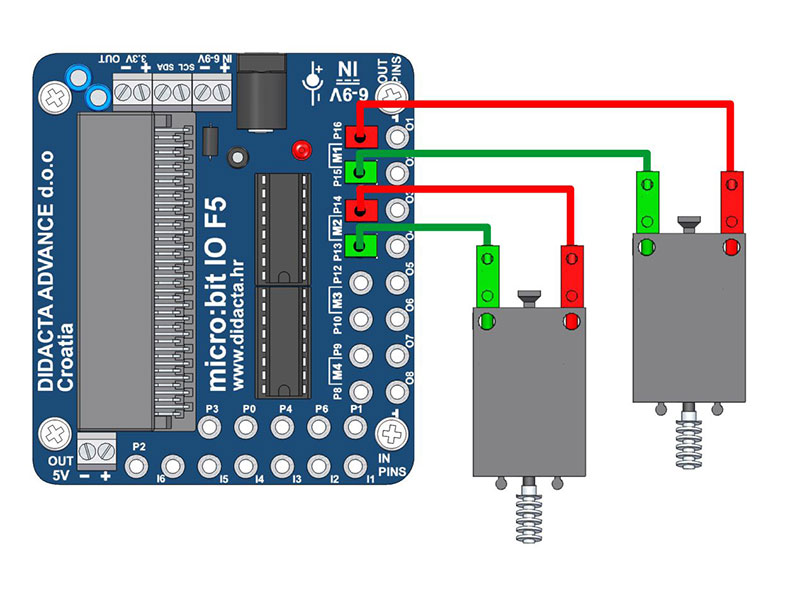
配線:2個のモーターをOUT1(P16)、OUT2(P15)にそれぞれ接続します。 |
||||
|
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||
|
||||
|
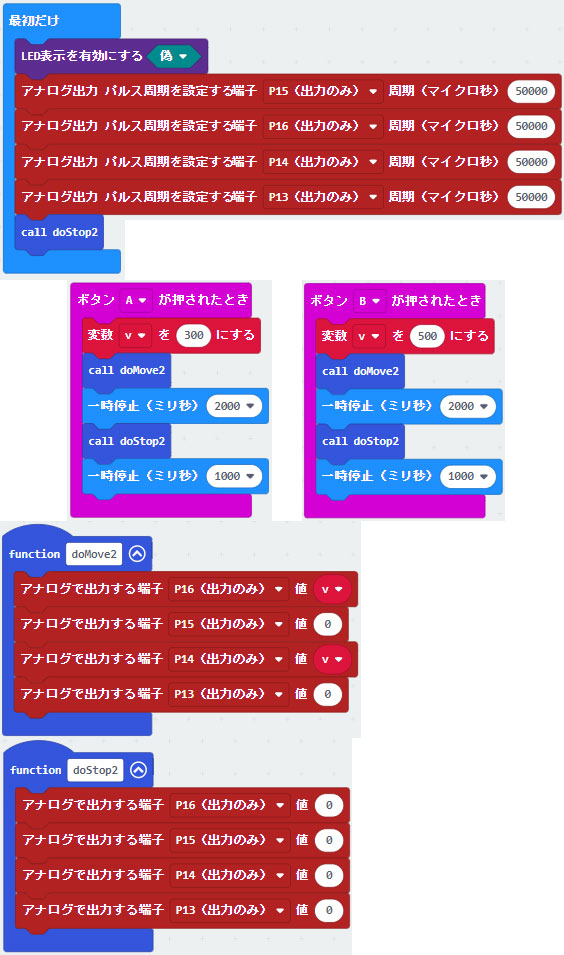
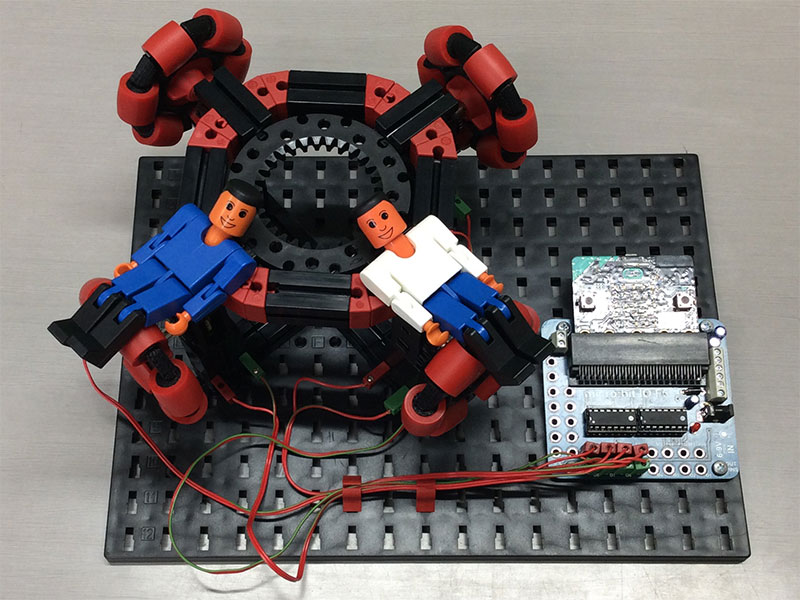
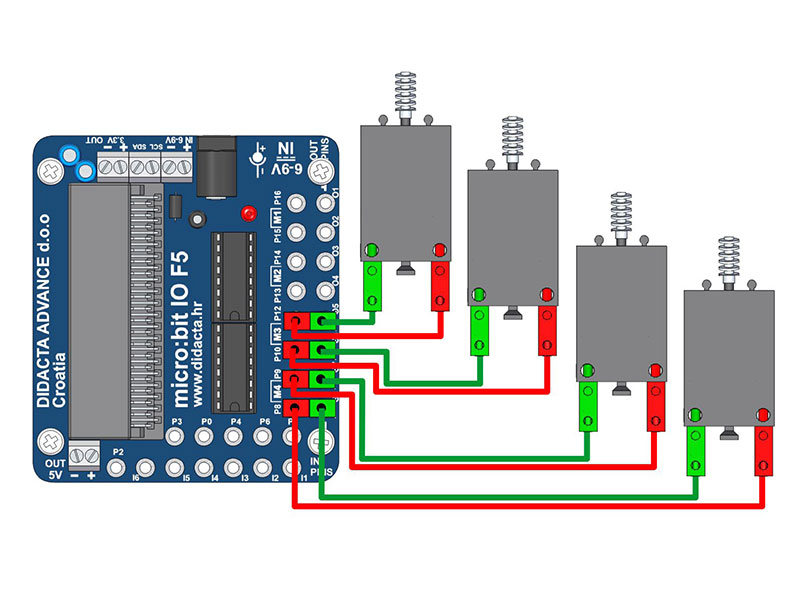
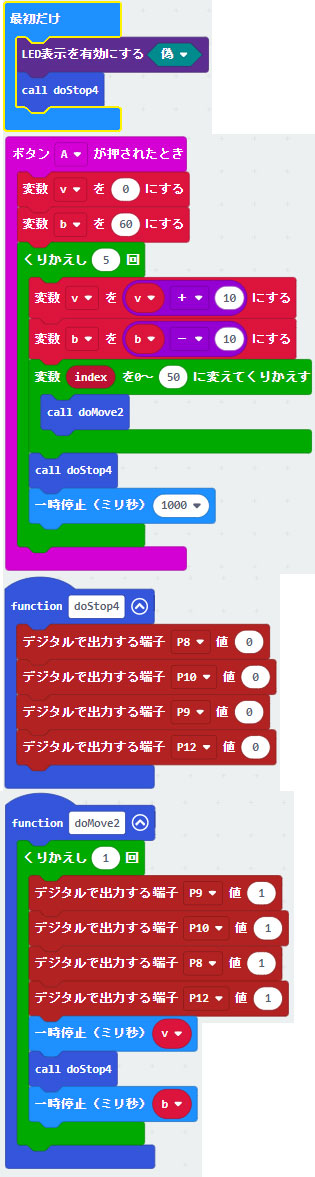
配線:4個のモーターをOUT5(P12)、OUT6(P13)、OUT7(P14)、OUT8(P15)にそれぞれ接続します。 |
||||
|
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||

|
||||
|
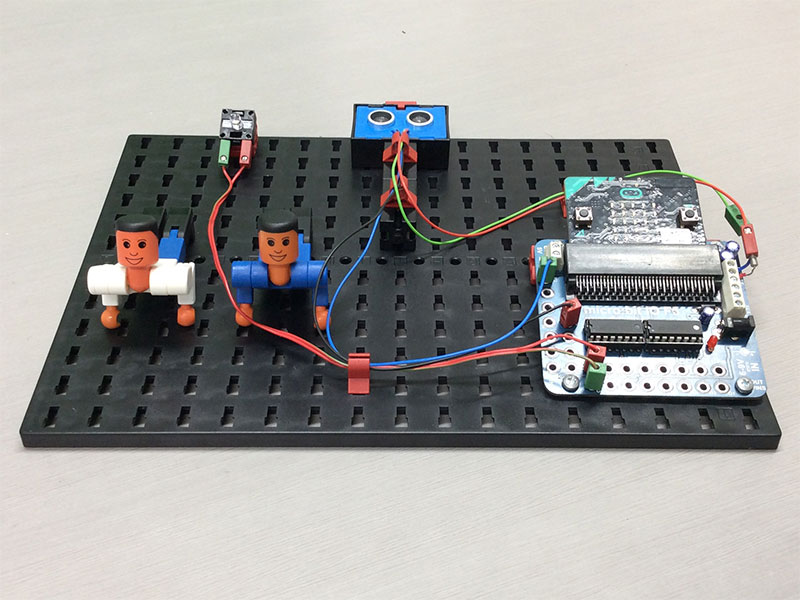
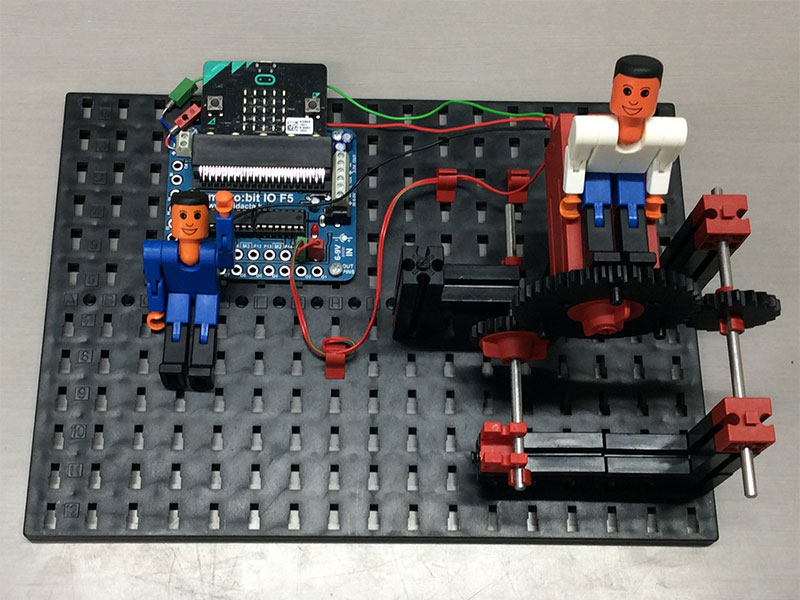
配線:モーターをOUT1(P16)に、カウンタ電源(緑と赤のワイヤー)はOUT5Vに、信号線はP1に接続します。 |
||||
|
 |
||||
|---|---|---|---|---|
|
|
||||
|
||||
|
||||
|
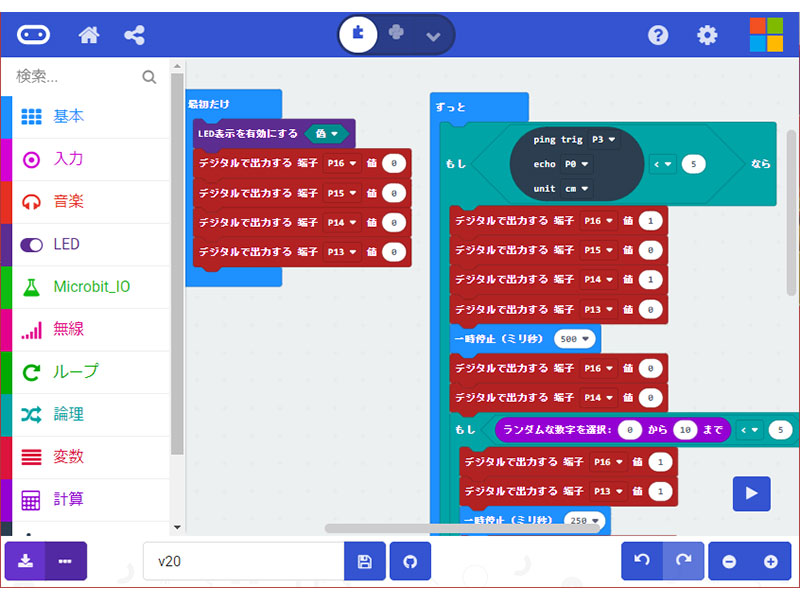
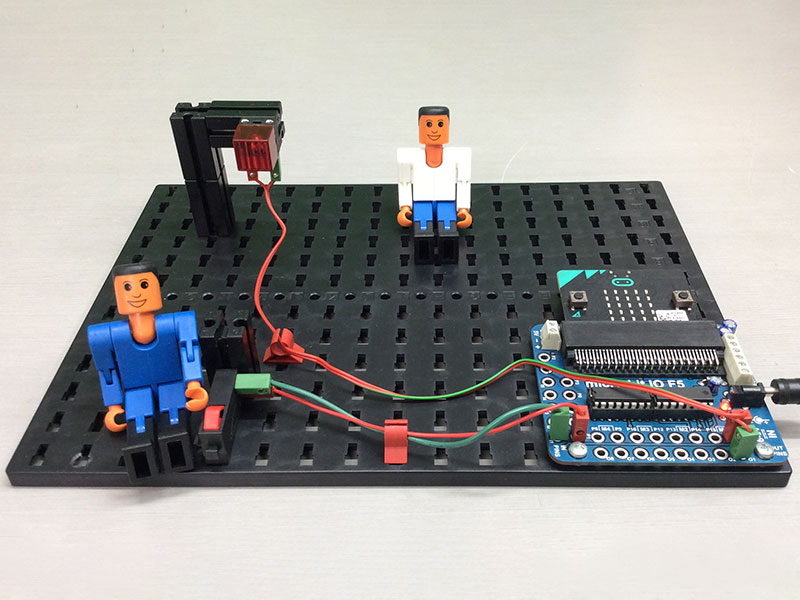
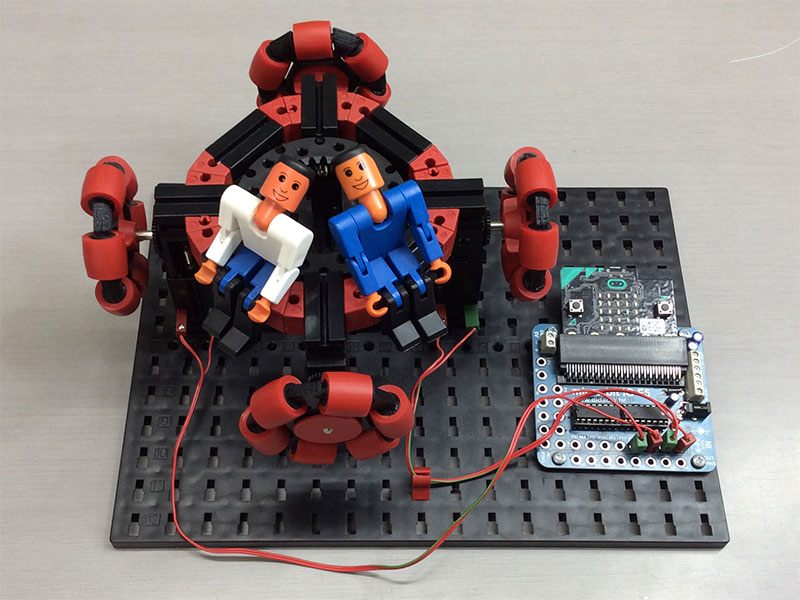
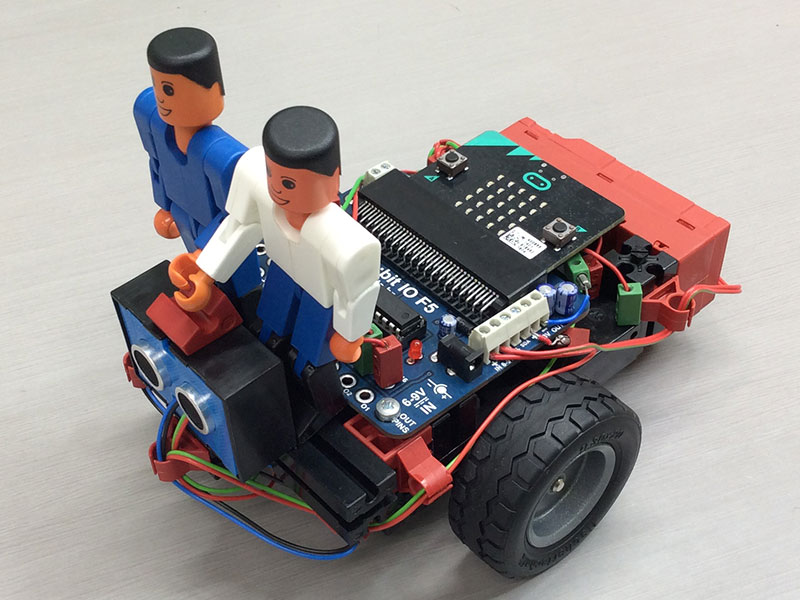
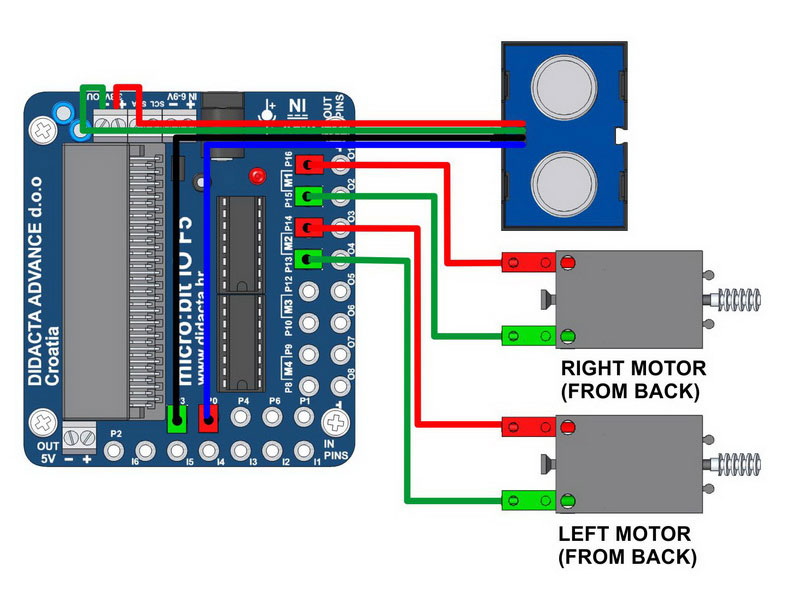
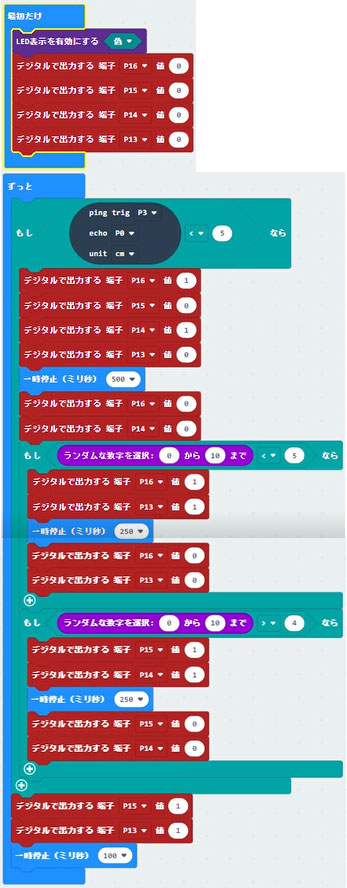
配線:超音波センサーを3.3V電源と、P0・P3に接続します。右側のモーターをOUT M1(P15・P16)に接続し、左側のモーターをOUT M2(P13・P14)に接続します。 |
||||
|